
From the Journal: Physics of Fluids
WASHINGTON, January 17, 2020 — Specially designed vacuum suction units allow humans to climb walls. Scientists have developed a suction unit that can be used on rough surfaces, no matter how textured, and that has applications in the development of climbing robots and robotic arms with grasping capabilities.
Traditional methods of vacuum suction and previous vacuum suction devices cannot maintain suction on rough surfaces due to vacuum leakage, which leads to suction failure.
Researchers Xin Li and Kaige Shi developed a zero-pressure difference (ZPD) method to enhance the development of vacuum suction units. Their method overcame leakage limitations by using a high-speed rotating water ring between the surface and suction cup to maintain the vacuum. They discuss their work in this week’s Physics of Fluids, from AIP Publishing.
“There are many applications of our design, but we think the wall-climbing robot will be the most useful,” said Li. “Compared to other wall-climbing robots, the robot with our ZPD-based suction unit achieves surprising improvement in performance.”
The centrifugal force of the rotating water eliminates the pressure difference at the boundary of the vacuum zone to prevent vacuum leakage. It can maintain a high vacuum pressure inside the suction cup.
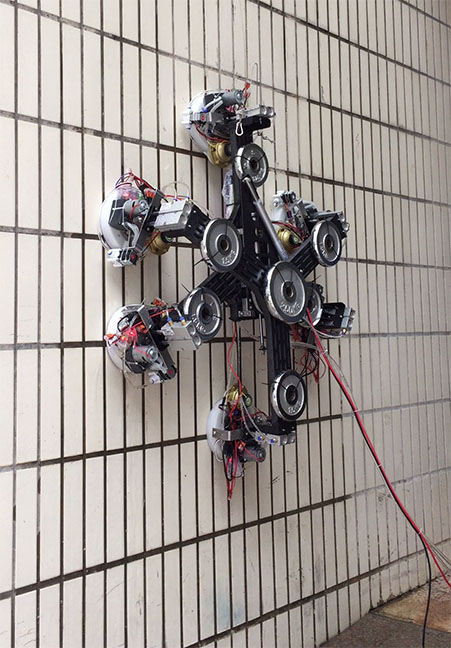
Their ZPD suction unit is energy-efficient and smaller and lighter than traditional suction units. The researchers tested their unit with three different suction sizes and applications: on a robotic arm to grip and handle objects, on a hexapod wall-climbing robot and as a Spider-Man-like wall-climbing device.
“The next step in this research is to cut down the water consumption. If the water consumption can be reduced, the suction unit will work for a very long time with little water so that the wall-climbing robot could carry its own water instead of being connected to a supply,” said Li.
###
For more information:
Larry Frum
media@aip.org
301-209-3090
Article Title
Vacuum suction unit based on the zero pressure difference method
Authors
Kaige Shi and Xin Li
Author Affiliations
Zhejiang University